STM32控制舵机转动_从0到1
清单
STM32F103C8T6 1个,Jlink下载线 1根
MG90S舵机 1个
12V电源 1个,12V转5V降压模块(给舵机供电) 1个
杜邦线数根
MG90S舵机
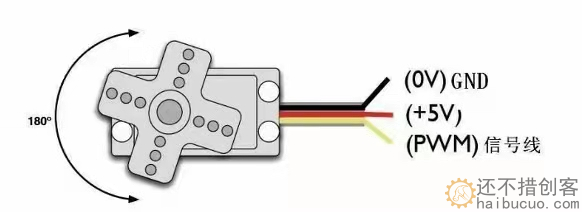
如图所示,舵机有三根线,红色接5V正极,黑色接地;黄色为信号线,接收PWM信号
实物图
输出PWM控制舵机
STM32控制舵机,总的来说是向舵机信号线发送周期为20ms的PWM(Pulse Width Modulation 脉冲宽度调制)信号来控制舵机转角,PWM脉冲的占空比决定了舵机的转角位置,对应关系如下图;
STM32靠定时器TIM实现PWM信号的输出,STM32有多个定时器,分为通用定时器和高级定时器,每个通用定时器都可以输出4路PWM,本文采用TM2_CH4,及定时器2的第4路PWM;对应STM32F103C8T6上的PB11引脚;
创建工程输出PWM
本文使用STM32CubeMX创建工程,更加简单高效,即便对单片机不熟悉也可操作成功;
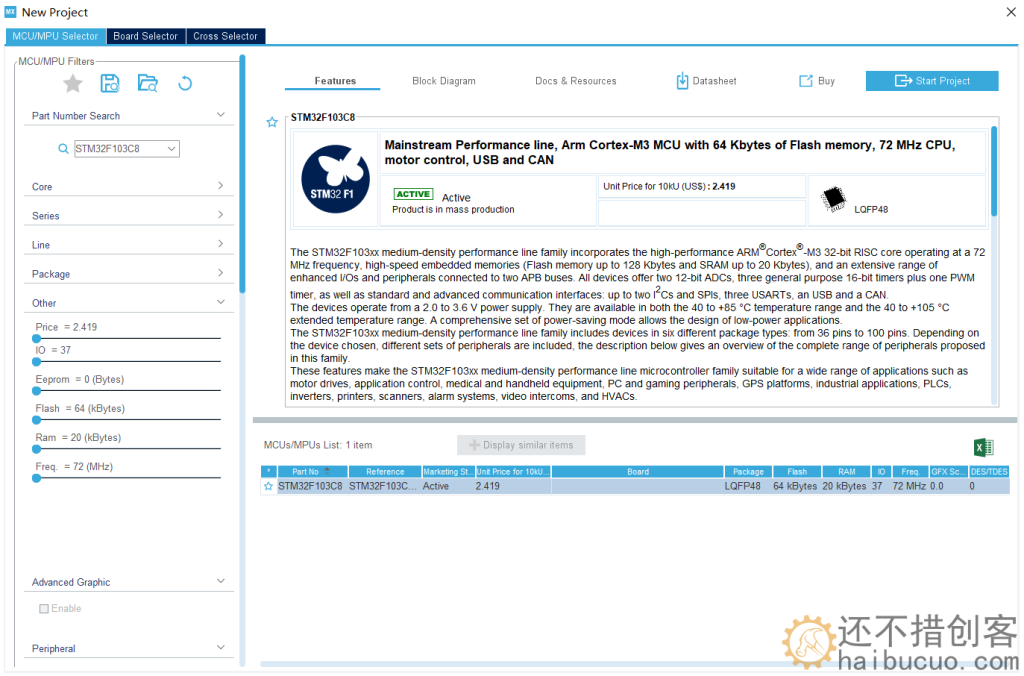
一、打开STM32CubeMX,新建一个工程,搜索并选择STM32F103C8,然后start project;
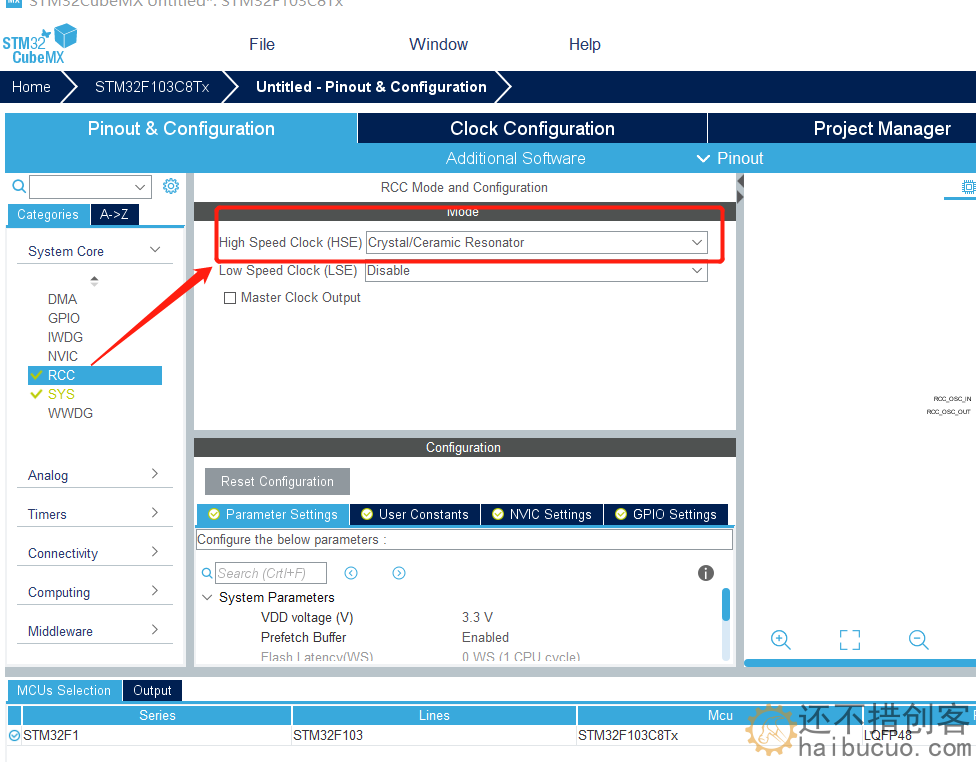
二、进行基本设置,配置RCC、SYS、HCLK
RCC -> 设置高速外部时钟HSE 选择外部时钟源
SYS -> 选择Debug方式 serial wire
HCLK -> 设置为72MHZ


三、设置定时器
选择TIM2
选择内部时钟源
设置Channel4为PWM模式
右侧对应管脚自动设置为复用模式
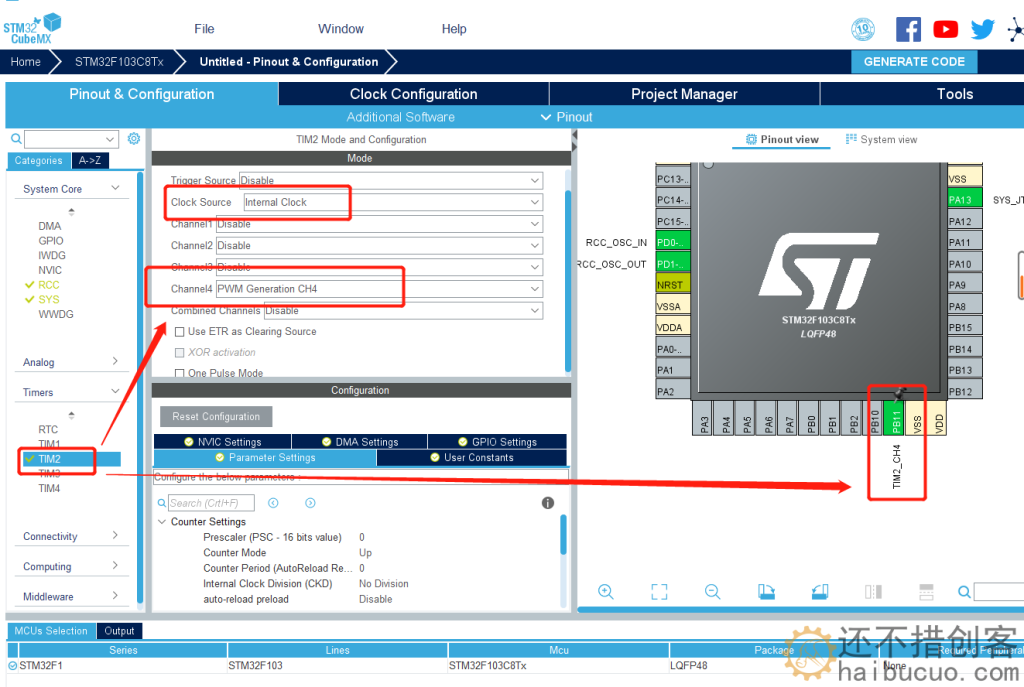
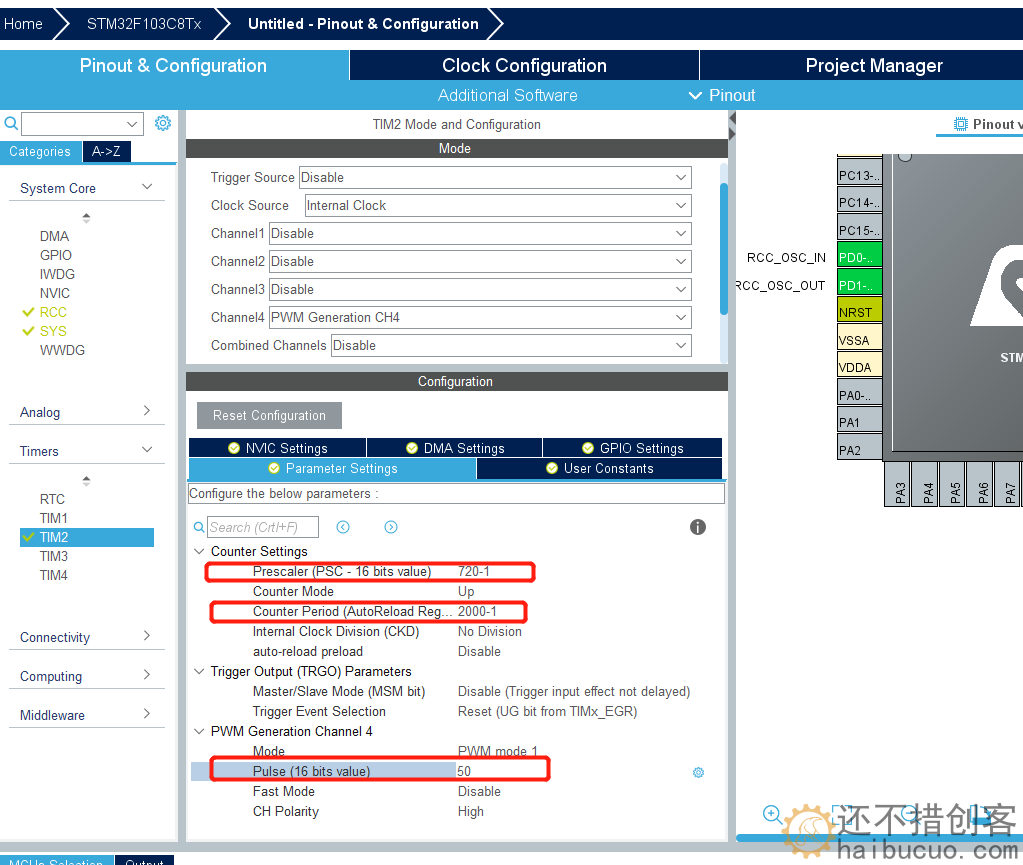
设置定时器参数
控制舵机我们需要设置PWM输出一个周期时间为20ms的信号,定时器时钟为72Mhz
预分频Prescaler设置为720-1,则单周期为72M/(Prescaler + 1) = 100Khz(0.01ms)
以20ms为周期,则Counter Period为20ms/0.01ms – 1 = 1999
此处可设定默认脉冲宽度为0.5ms,及0.5/20*2000 = 50
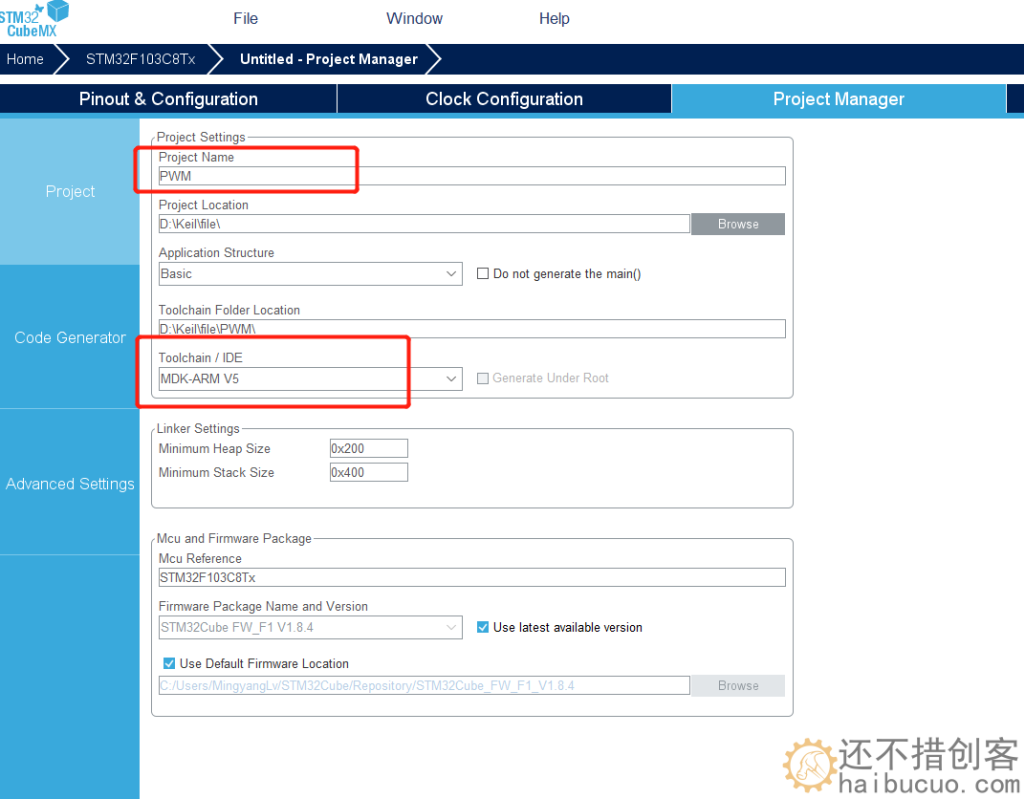
四、接下来设置输出格式
添加工程名PWM
修改IDE为MDK-ARM V5
在Code Genetator中设置包含库与工程格式

至此STM32CubeMX已设置完成,接下来GENERATE CODE,并打开文件;
在main函数中启动定时器,并输出一定的脉冲的PWM信号即可驱动舵机;
五、修改代码
在main.c文件相应位置处添加如下代码
启动PWM输出
输出PWM信号/* USER CODE BEGIN Includes */ #include “stdio.h” /* USER CODE END Includes */ /* USER CODE BEGIN 2 */ HAL_TIM_PWM_Start(&htim2,TIM_CHANNEL_4); //启动定时器 int compareValue = 150; //将compareValue设置为50、150、250分别对应0°、90°、180° /* USER CODE END 2 */ /* Infinite loop */ /* USER CODE BEGIN WHILE */ while (1) { /* USER CODE END WHILE */ /* USER CODE BEGIN 3 */ __HAL_TIM_SET_COMPARE(&htim2, TIM_CHANNEL_4, compareValue); //输出PWM信号 HAL_Delay(10); } /* USER CODE END 3 */ }
添加完以上代码之后,编译,然后通过JLink将程序LOAD到STM32F103C8T6,将舵机信号线连接PB11(TIM2_CHANNEL4)口,并接上电源,舵机即可转动到指定角度;由以上定时器设定可知,compareValue值50、150、250 对应 0.5ms、1.5ms、2.5ms 对应 0°、90°、180°;若想让舵机连续转动,在50~250内循环改变compareValue值即可;
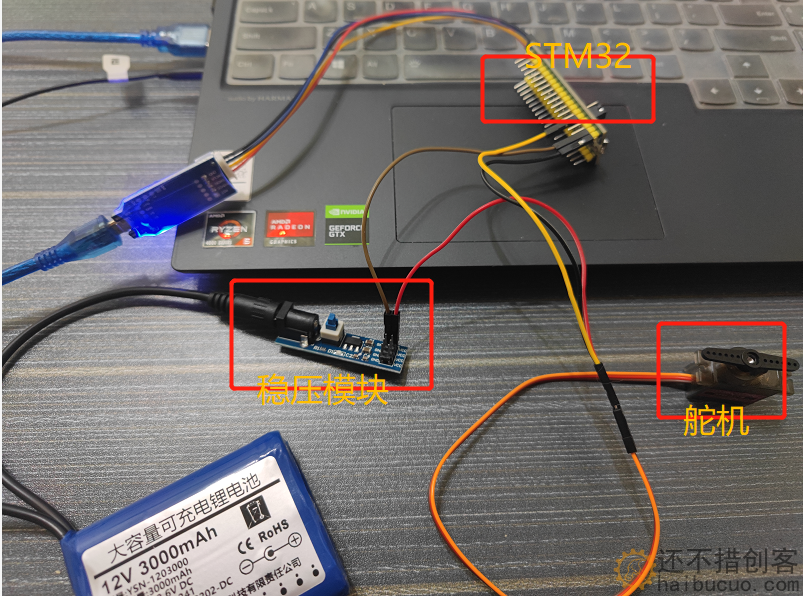
六、接线
开始时用单片机的5V输出给舵机供电,舵机哒哒哒响,但是不转,怀疑是供电不给力,单独供电后驱动成功;
JIink连接电脑和单片机,下载程序到单片机并给单片机供电
舵机黄色信号线接STM32F103C8T6引脚PB11,接收PWM信号
舵机红色电源线接稳压板5V输出正极,舵机黑色地线需与单片机地相连
调试
实操中可能会出现各种各样的问题,以下有几种调试方法
一、舵机测试
调试模块一端接电,一段接舵机,手动模式下,舵机会跟着旋钮同步旋转,可以用来测试舵机是否健康;

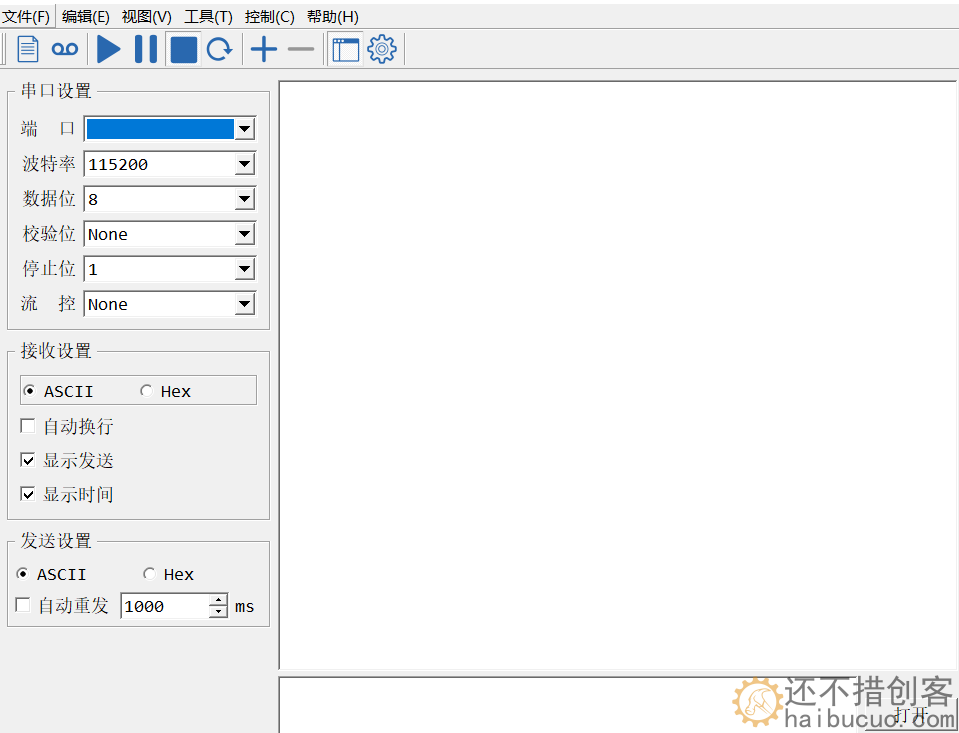
二、串口调试助手
可下载串口调试助手,用ttl转USB模块连接电脑,在特定位置进行打印输出,检查程序是否按预设运行
————————————————
版权声明:本文为CSDN博主「DDHEJKS」的原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接及本声明。
原文链接:https://blog.csdn.net/weixin_42836162/article/details/124025895

