
简介:
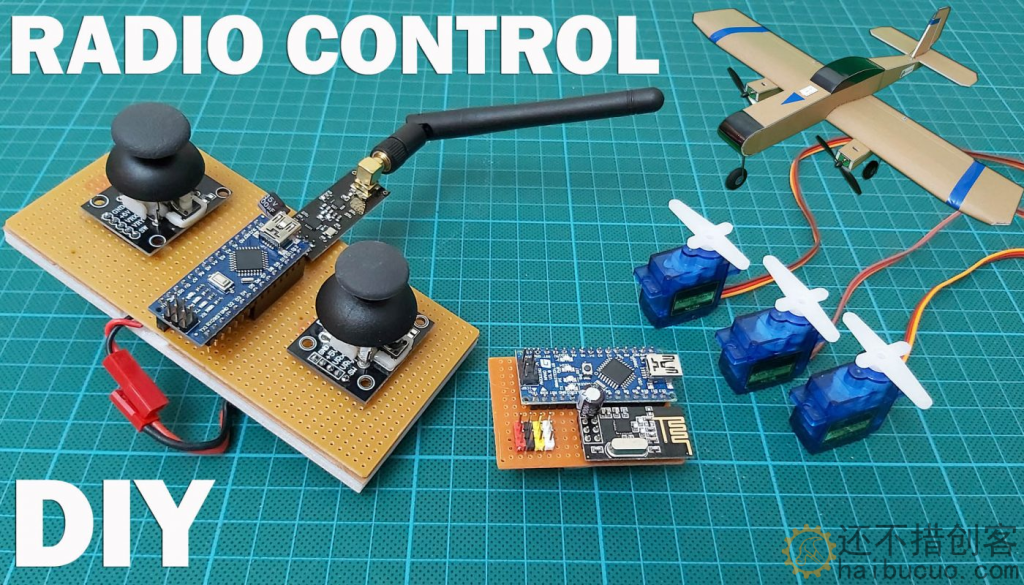
如何为RC模型飞机、无人机、汽车和船只制作低成本的4通道遥控器。
建造带有比例控制的遥控器,成本约为13-14美元。它可用于各种模型车辆控制,如模型飞机、无人机、汽车、船、坦克。
材料清单:
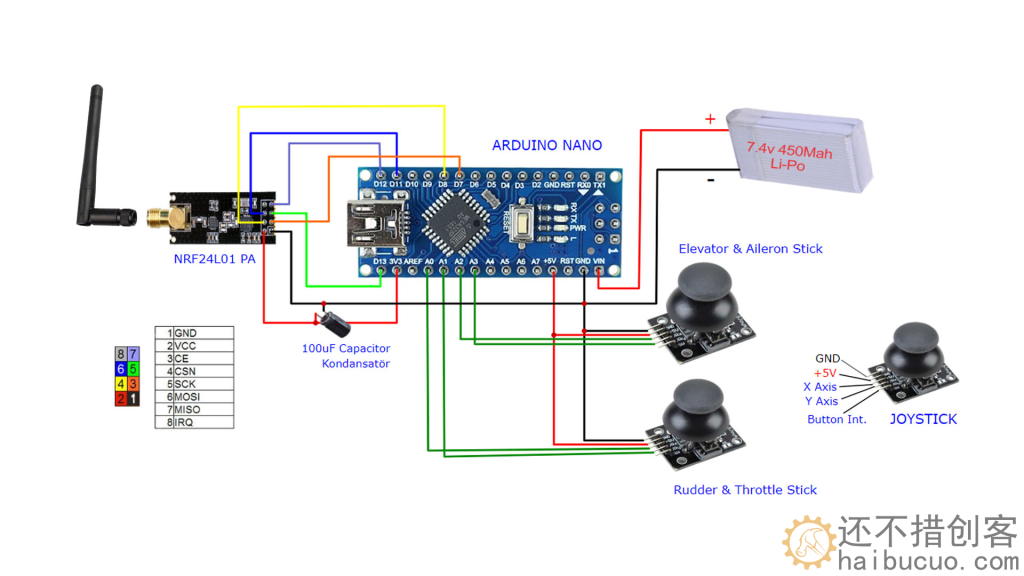
2 x Arduino Nano
1 x NRF24L01 + PA 无线收发模块
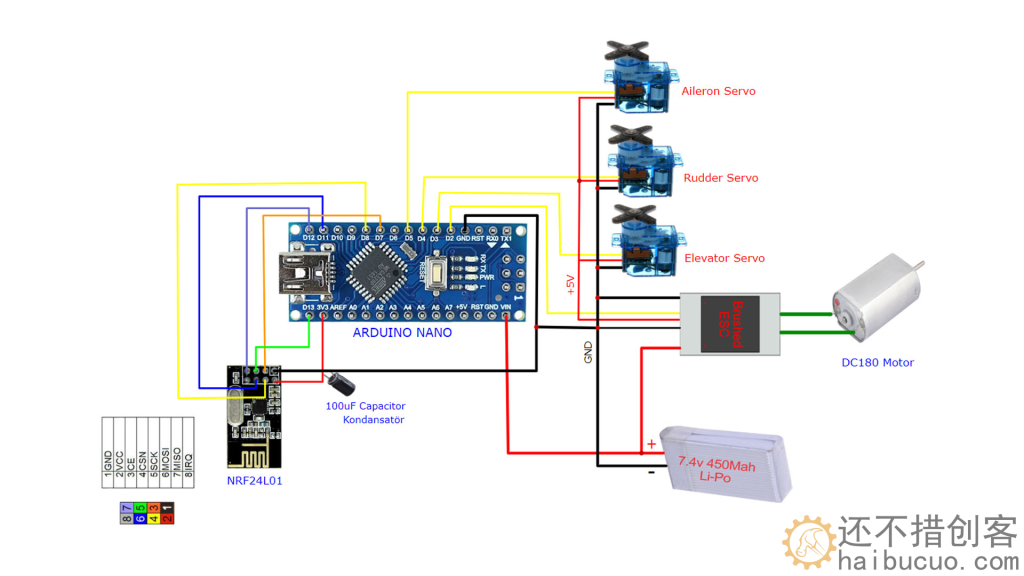
1 x NRF24L01 无线收发模块
2 x Arduino joystick
2 x 100uF 电容 (16V 以上)
1 x 13 * 6 cm PCB 电木板
1 x 5 * 3.5 cm PCB 电木板
3 x SG90 舵机
1 x 20A ESC 电子调速器
2 x 7.4V 450Mah 2S 锂电池
1 x DC 180 Motor 39000 RPM 电机
线路图:
代码:
发射板:
// 4 Channel Transmitter | 4 Kanal Verici
#include <SPI.h>
#include <nRF24L01.h>
#include <RF24.h>
const uint64_t pipeOut = 0xE9E8F0F0E1LL; //IMPORTANT: The same as in the receiver 0xE9E8F0F0E1LL | Bu adres alıcı ile aynı olmalı
RF24 radio(7, 8); // select CE,CSN pin | CE ve CSN pinlerin seçimi
struct Signal {
byte throttle;
byte pitch;
byte roll;
byte yaw;
};
Signal data;
void ResetData()
{
data.throttle = 127; // Motor Stop (254/2=127)| Motor Kapalı (Signal lost position | sinyal kesildiğindeki pozisyon)
data.pitch = 127; // Center | Merkez (Signal lost position | sinyal kesildiğindeki pozisyon)
data.roll = 127; // Center | merkez (Signal lost position | sinyal kesildiğindeki pozisyon)
data.yaw = 127; // Center | merkez (Signal lost position | sinyal kesildiğindeki pozisyon)
}
void setup()
{
//Start everything up
radio.begin();
radio.openWritingPipe(pipeOut);
radio.stopListening(); //start the radio comunication for Transmitter | Verici olarak sinyal iletişimi başlatılıyor
ResetData();
}
// Joystick center and its borders | Joystick merkez ve sınırları
int mapJoystickValues(int val, int lower, int middle, int upper, bool reverse)
{
val = constrain(val, lower, upper);
if ( val < middle )
val = map(val, lower, middle, 0, 128);
else
val = map(val, middle, upper, 128, 255);
return ( reverse ? 255 - val : val );
}
void loop()
{
// Control Stick Calibration | Kumanda Kol Kalibrasyonları
// Setting may be required for the correct values of the control levers. | Kolların doğru değerleri için ayar gerekebilir.
data.throttle = mapJoystickValues( analogRead(A0), 524, 524, 1015, true );
data.roll = mapJoystickValues( analogRead(A1), 12, 524, 1020, true ); // "true" or "false" for servo direction | "true" veya "false" servo yönünü belirler
data.pitch = mapJoystickValues( analogRead(A2), 12, 524, 1020, true ); // "true" or "false" for servo direction | "true" veya "false" servo yönünü belirler
data.yaw = mapJoystickValues( analogRead(A3), 12, 524, 1020, true ); // "true" or "false" for servo direction | "true" veya "false" servo yönünü belirler
radio.write(&data, sizeof(Signal));
}接收板:
// 4 Channel Receiver | 4 Kanal Alıcı
// PWM output on pins D2, D3, D4, D5 (Çıkış pinleri)
#include <SPI.h>
#include <nRF24L01.h>
#include <RF24.h>
#include <Servo.h>
int ch_width_1 = 0;
int ch_width_2 = 0;
int ch_width_3 = 0;
int ch_width_4 = 0;
Servo ch1;
Servo ch2;
Servo ch3;
Servo ch4;
struct Signal {
byte throttle;
byte pitch;
byte roll;
byte yaw;
};
Signal data;
const uint64_t pipeIn = 0xE9E8F0F0E1LL;
RF24 radio(7, 8);
void ResetData()
{
// Define the inicial value of each data input. | Veri girişlerinin başlangıç değerleri
// The middle position for Potenciometers. (254/2=127) | Potansiyometreler için orta konum
data.throttle = 127; // Motor Stop | Motor Kapalı
data.pitch = 127; // Center | Merkez
data.roll = 127; // Center | Merkez
data.yaw = 127; // Center | Merkez
}
void setup()
{
//Set the pins for each PWM signal | Her bir PWM sinyal için pinler belirleniyor.
ch1.attach(2);
ch2.attach(3);
ch3.attach(4);
ch4.attach(5);
//Configure the NRF24 module
ResetData();
radio.begin();
radio.openReadingPipe(1,pipeIn);
radio.startListening(); //start the radio comunication for receiver | Alıcı olarak sinyal iletişimi başlatılıyor
}
unsigned long lastRecvTime = 0;
void recvData()
{
while ( radio.available() ) {
radio.read(&data, sizeof(Signal));
lastRecvTime = millis(); // receive the data | data alınıyor
}
}
void loop()
{
recvData();
unsigned long now = millis();
if ( now - lastRecvTime > 1000 ) {
ResetData(); // Signal lost.. Reset data | Sinyal kayıpsa data resetleniyor
}
ch_width_1 = map(data.throttle, 0, 255, 1000, 2000); // pin D2 (PWM signal)
ch_width_2 = map(data.pitch, 0, 255, 1000, 2000); // pin D3 (PWM signal)
ch_width_3 = map(data.roll, 0, 255, 1000, 2000); // pin D4 (PWM signal)
ch_width_4 = map(data.yaw, 0, 255, 1000, 2000); // pin D5 (PWM signal)
// Write the PWM signal | PWM sinyaller çıkışlara gönderiliyor
ch1.writeMicroseconds(ch_width_1);
ch2.writeMicroseconds(ch_width_2);
ch3.writeMicroseconds(ch_width_3);
ch4.writeMicroseconds(ch_width_4);
}原来项目地址:
Simple and Cheap Radio Control Making for RC Models. DIY RC
B站博主讲解: